 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
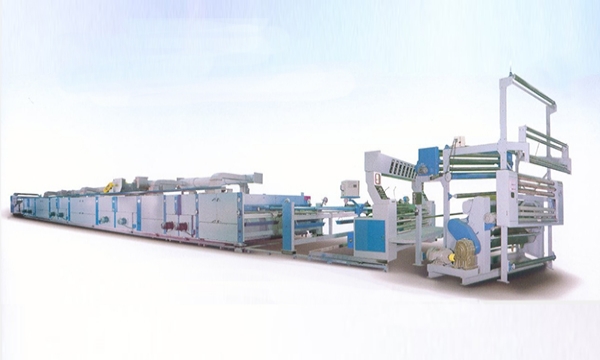
Vietnamese - Tiếng ViệtPrinciple of hardware speed tracking circuit in frequency inverter
Our AC70 series inverters all have hardware speed tracking function. After the inverter stops, the motor can start directly and smoothly before the motor stops rotating. How does the hardware and software cooperate to achieve this function? The principle will be explained in detail below.
After the inverter stops, the motor will not stop immediately due to the moment of inertia. When the rotor of the motor has not stopped rotating, there will be residual voltage on U\V\W. This residual voltage amplitude, phase and direction is directly related to motor rotation speed, rotor position and operation direction, and of course related to the motor body parameters.
Therefore, the line voltage between U\V and V\W can be detected by the hardware circuit. After the amplitude of the sampled line voltage is reduced to a relatively small voltage value, the voltage value is set to a reference voltage (VREF is usually set to 0.1). V is about to generate a pulse signal after comparison, because the sample is the motor U\V\W voltage, in order to ensure the insulation between the weak side and the strong side, add a level of optocoupler isolation circuit and then send the DSP processing, into the MCU side the frequency of the wave signal corresponds to the motor speed, and the phase represents the direction of rotation of the motor. The block diagram of the circuit detection is as follows:
The actual test voltage waveform is as follows:
CH1 (yellow): UV line voltage
CH2 (green): WV line voltage
CH3 (blue): FCH1
CH4 (red): FCH2
The UV and WV input voltages have an amplitude of 5Vpp and a phase difference of 120°.
When the MCU detects the FCH1 and FCH2 pulse signals, the motor speed is judged by reading the pulse frequency of FCH1. By detecting the phase of the FCH1 and FCH2 signals, we could detect whether the motor is forward or reverse, and then start the drive directly before the motor is not stopped.







 Leave a Message
Leave a Message